上海车展演讲分享|Nullmax一段式端到端架构设计新思路
发布时间:2025-04-284月26日, 2025上海车展汽车智能化峰会的端到端自动驾驶专题论坛上,Nullmax 首席科学家成二康博士发表《端到端 - One Model Decoder 架构设计》主题演讲,重点讲解 Nullmax 在端到端技术领域取得的成果,深度解析 Nullmax 在一段式端到端自动驾驶技术领域的探索与发现,为行业发展提供了新的思路。
本届中国汽车智能化创新峰会是2025上海车展官方活动之一,也是智一科技连续第四届在上海车展同期举办的线下大会,共吸引近20位智能汽车产业技术产品大咖与青年学者参与。

稳扎稳打:夯实端到端技术根基
演讲中,成二康博士提到Nullmax平台化BEV-AI架构设计,针对自动驾驶感知中的动态障碍物检测(BEV-AI-OD)、静态地图理解(BEV-AI-Map)、车道线检测(BEV-AI-Lane)、时序信息处理(BEV-AI-Temporal)以及拓扑结构预测(BEV-AI-Topo)等关键环节,Nullmax 对 Transformer 中的 Decoder 进行了高效的针对性设计,并成功推动其规模化落地。

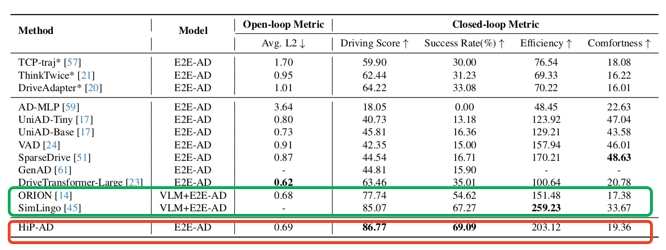
基于在 BEV-AI-Perception 中对 Transformer Decoder 的深入研究和丰富经验,Nullmax 推出了 HiP-AD 方案。团队发现,设计一款专为辅助驾驶任务定制的 Decoder,可达到感知规划端到端的设计目标,而且无需依赖大语言模型的庞大参数量。
事实证明,HiP-AD 方案成效明显。在Nullmax团队一系列的测试中,它的表现超越了部分 VLM+E2E 和 VLA 的端到端方案。在城市复杂路况测试中,HiP-AD 方案能够快速、准确地感知周围环境信息,包括车辆、行人、交通信号灯等,还能迅速规划出合理的行驶路径,面对车辆加塞、行人突然横穿马路等复杂情况时,决策既合理又及时,展现出了接近人类优秀驾驶水平的能力。
One Model Decoder 架构:小参数量,大能量
Nullmax端到端One Model Decoder 架构其参数量仅在几千万左右,却能与业内参数量高达 1B 到 7B 的其他模型方案达到相同的优异效果。这一架构在硬件适配性上表现尤为卓越,无论是中高算力芯片平台,还是高算力芯片平台,它都能游刃有余地发挥作用。
目前,Nullmax基于Decoder-only的一段式端到端技术架构,在架构设计和工程化落地方面均取得了不错进展。Nullmax已经成功实现复杂场景下的端到端城市辅助驾驶功能,而基于语言模型大参数量的 VLA 端到端方案也即将实现量产,为用户带来更加智能、便捷的驾驶体验。
此外,为了给端到端设计提供源源不断的动力,Nullmax 推出了自主成长数据平台。该平台依托 BEV-AI-AutoGT 和虚拟数据生成技术,不断强化基础设施建设。BEV-AI-AutoGT 技术实现了自动化的真值标注,相比传统人工标注,效率和准确性大幅提升。大量高质量标注数据为模型训练提供了充足 “养分”,加速了模型的优化进程。虚拟数据生成技术则在虚拟环境中模拟各种极端和罕见的交通场景,生成丰富多样的训练数据,有效弥补了真实数据的不足,显著增强了模型的泛化能力和鲁棒性。
结语:
从平台化 BEV-AI 架构的搭建,到一段式端到端技术的突破,Nullmax 不仅在前沿自动驾驶技术上独辟蹊径,更展现出将创新成果高效转化为实际应用的硬核实力。
如今,一段式端到端技术架构即将实现工程化落地,标志着 Nullmax 在自动驾驶领域的探索将迈向新高度。未来,Nullmax 还计划陆续进行技术开源,以开放共享的姿态,为行业发展注入新动能,推动自动驾驶技术迈向更广阔的未来。
媒体垂询
media@nullmax.ai相关文章
- 为物理AI而生的生成式导航大脑——Nullmax稀疏全要素生成式端到端方案UniTeD入选ECCV 2026 2026-06-25
- Nullmax 2025 年度智权布局回顾,以通用技术智变未来 2026-01-29
- GTM 2025 全球科技出行大会 | Nullmax 演绎大模型时代智驾进阶 2025-12-09
- 普适产品进阶 | Nullmax一体机/小域控的量产加速器 2025-11-26
- AAAI 2026公布!Nullmax端到端轨迹规划论文入选 2025-11-10