普适产品进阶 | Nullmax一体机/小域控的量产加速器
发布时间:2025-11-26那么,面向行业对智能前视一体机及小域控方案的迫切普及需求,Nullmax如何将这套领先的感知技术能力,高效转化为可大规模落地的量产“普适”优势?
Nullmax的解题关键在于——以感知算法平台化为核心路径,实现领先智驾算法在量产部署上的“化繁为简”。通过构建一套能够灵活适配不同传感器与芯片的软件架构,Nullmax可实现跨车型的快速功能落地,为一体机、小域控方案的量产提速提质。目前,在多个Nullmax高性价比产品的量产推进中,该平台化能力正持续释放其规模效应。
在此过程中,Nullmax同步解决了两大核心命题:既要实现全栈自研的感知算法在不同车型、芯片平台上的高效部署,以速度响应市场;也要在有限的算力与成本条件下,坚守“简而优”的产品技术底线,确保一体机、小域控的功能体验优异,并具备持续迭代进化能力。
平台化需充分考虑需求和硬件差异
为此,Nullmax打造了涵盖L2+及L4感知任务的平台化感知架构,可以支持大算力、小算力的不同计算平台,也能自动适配不同的传感器配置,为一体机/小域控、舱驾/行泊一体乃至端到端高阶智驾等产品应用的高效落地提供核心的技术支撑。
通过“化繁为简”,平台可在算力受限场景中精准裁剪,仅保留必要任务分支,甚至通过模型剪枝实现极简感知方案,在低成本硬件上保障 AEB、ACC、LCC 等 L2 级 ADAS 核心功能的可靠运行。这一策略尤其契合一体机、小域控方案的特性,确保Nullmax在有限资源下实现感知效能的最大化。

cut-in识别并适当减速 大曲率弯道场景
城区跟车启停 跟随异形车辆过十字路口
灵活部署,One Model驱动小算力进化
Nullmax感知平台化的实现,离不开一套坚实的技术架构,而其中最为核心的,便是模型架构的设计。为此,Nullmax打造了平台化的BEV-AI自动驾驶技术架构,为感知提供One Model形态的模型架构,用一个可以灵活适配的模型支持所有感知任务,满足不同智能驾驶应用的感知需求,从而实现整个感知系统的平台化。
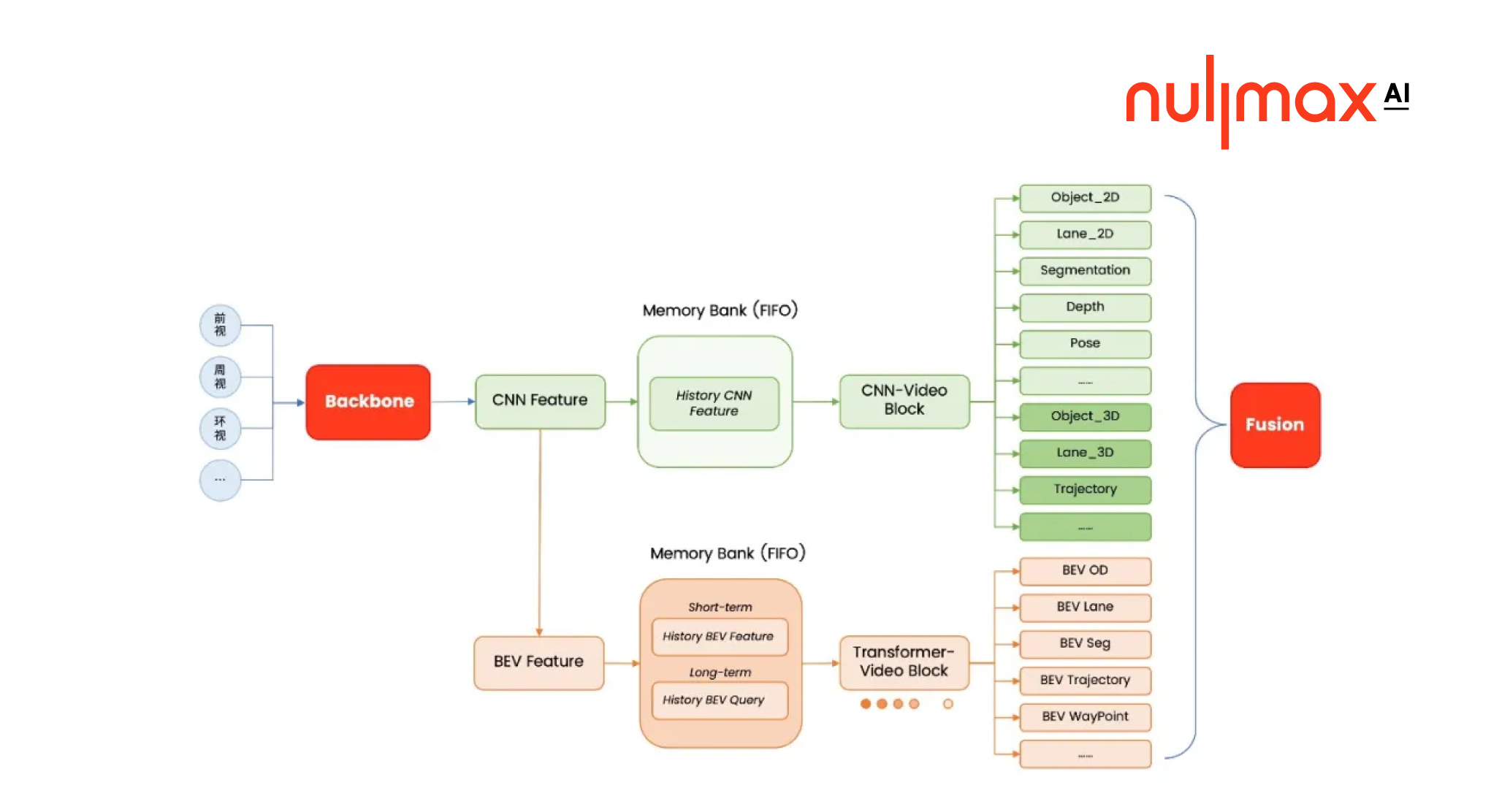
Nullmax感知平台化的模型架构示意
此外,Nullmax的感知模型架构具备一项重要特点:集成多个功能重复的任务分支,从而帮助网络取得更好的训练效果,从而实现更好的算法性能。比如,基于CNN的2D目标检测、3D目标检测和基于Transformer的BEV目标检测,基于CNN的2D车道线检测、3D车道线检测和基于Transformer的BEV车道线检测、BEV分割,这些任务之间高度相通,那么共同训练时可以在知识上互通有无,帮助彼此达到更好性能,为一体机与小域控的持续升级奠定了核心技术基石。
通过系统化的平台战略与灵活的模型设计,Nullmax在推进高性价比方案量产的同时,持续夯实技术的通用性与扩展性,不仅让智能驾驶以更低的门槛走向更多车
媒体垂询
media@nullmax.ai相关文章
- 为物理AI而生的生成式导航大脑——Nullmax稀疏全要素生成式端到端方案UniTeD入选ECCV 2026 2026-06-25
- Nullmax全栈智驾产品亮相2026北京车展,以生态共创彰显智驾广度 2026-04-24
- Nullmax 2025 年度智权布局回顾,以通用技术智变未来 2026-01-29
- 普适产品进阶 | Nullmax 一体机/小域控的“超感视觉” 2025-11-19
- AAAI 2026公布!Nullmax端到端轨迹规划论文入选 2025-11-10